
自作ロボットアームの紹介
ロボットアームを自作したい方向けに、Arduinoを使った6軸ロボットアームの作り方をまとめました。
本記事では、初心者でも再現できる構成で
・必要な部品
・組み立て手順
・プログラム制御
・よくあるトラブル(サーボが震える/電源不足でガタつく など)
を実機ベースで解説しています。
総額2万円前後で製作できるコスパ重視の構成なので、電子工作初心者〜中級者の方でもチャレンジ可能です。
まずは全体像を把握したい方は、以下のSTEPから順番にご覧ください。
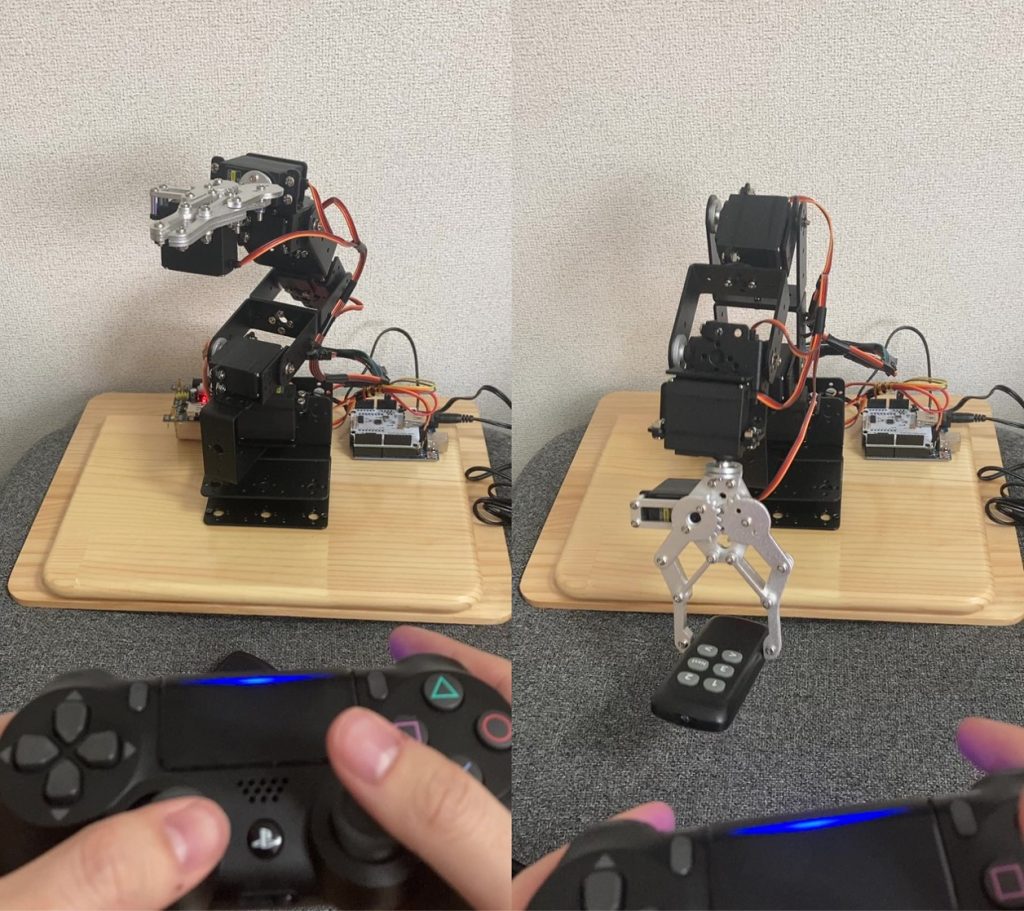
デモ動画
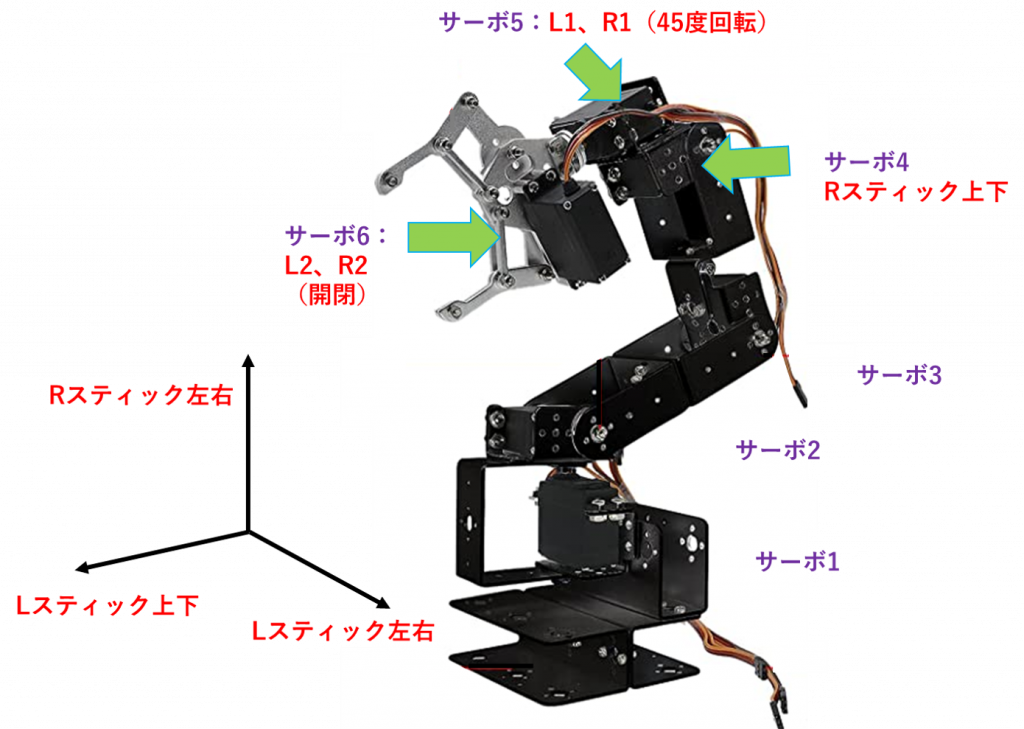
PS4のコントローラーでロボットアームを操作し、リモコンなどの小物を掴むことができます。
ロボットアームの構成
今回作るロボットアームは、主に以下の三つの構成で成り立っています。
- 機構:ロボットアームの本体部分
- 回路:Arudino等のマイコン・回路部分
- プログラム:マイコンの制御部分
一度にすべてを解説すると記事が長くなってしまうので、それぞれ別記事にて解説します。
◆◆◆ STEP1_基礎編:とにかく動かす ◆◆◆
上の動画のロボットアームは、STEP1_基礎編までで再現できます。
STEP1_基礎編の記事を順番に進めることで、ロボットアームを実際に動かせる状態まで完成します。
👉 最初は「テスト回路の作り方」から進めてください。
その②_テスト回路の作り方
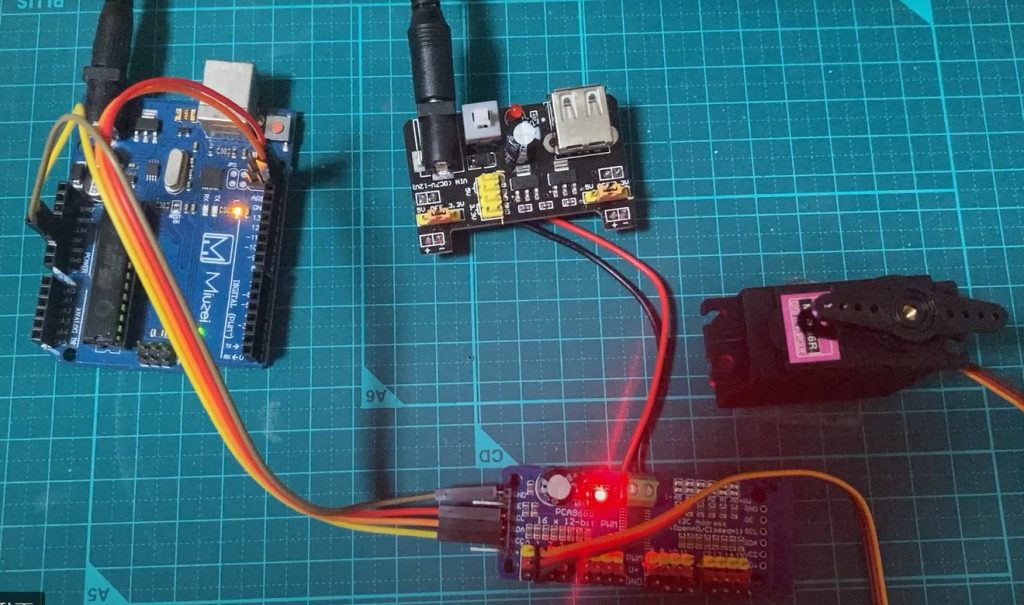
サーボモーターは、組み立て前に初期位置(角度)を揃えておく必要があります。
これをやらずに組み立ててしまうと、関節が干渉して動かなくなったり、正しく制御できなくなる原因になります。
本記事では、Arduinoとモータードライバーを使ってサーボを動かし、組み立て前に正しい位置へ調整する方法を解説しています。
👇 組み立てで失敗したくない方は、必ずここから進めてください。
その③_機構部の組み立て方
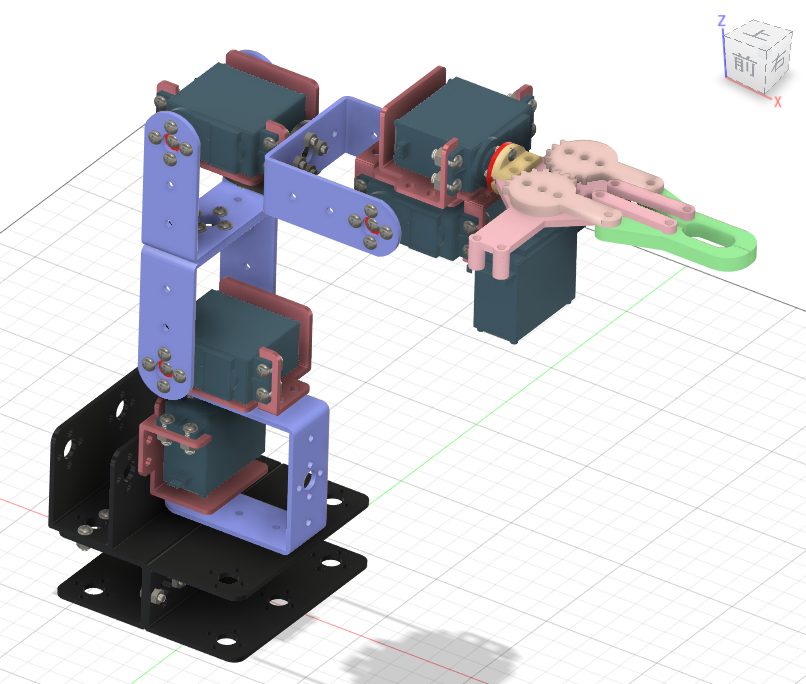
ロボットアームの組み立ては、一見シンプルに見えますが、付属マニュアルが分かりにくく、ネジの種類や取り付け位置で迷いやすい工程です。
本記事では、実際の組み立て手順とあわせて、初心者がつまずきやすいポイントや注意点を分かりやすく解説しています。
👇 迷わず組み立てたい方は、こちらを参考に進めてください。
その④_回路部分の作り方
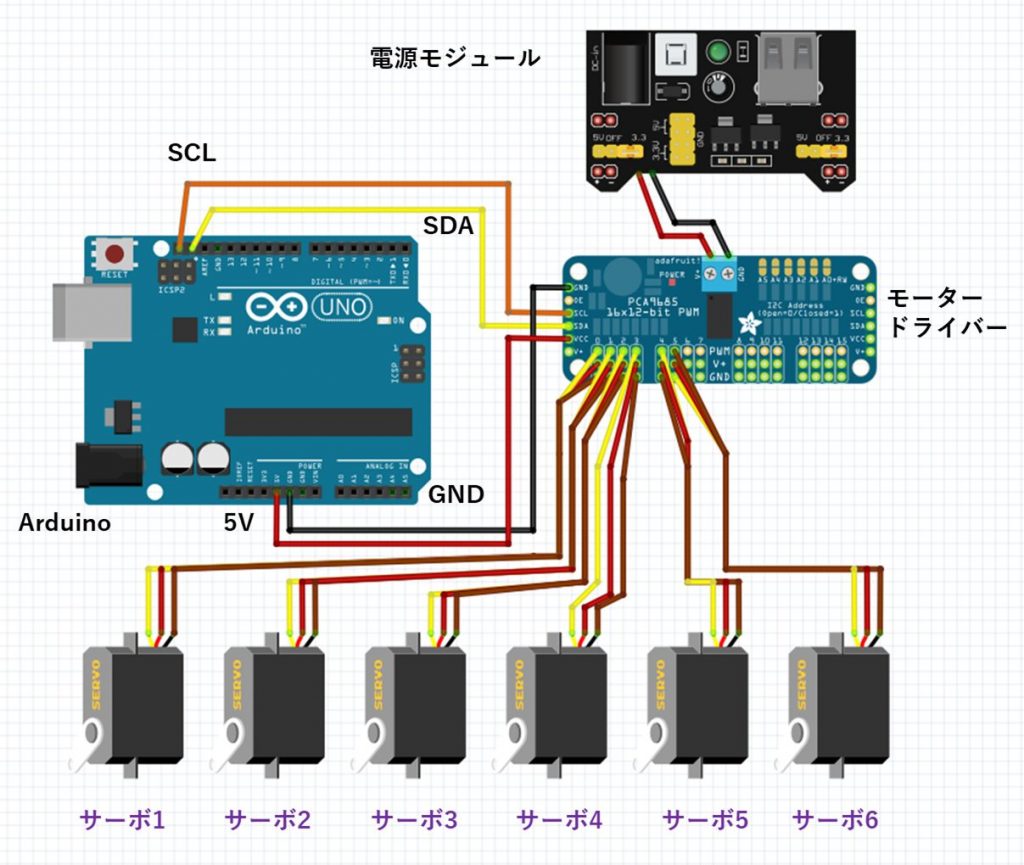
ロボットアームの回路は、配線を間違えるとサーボが動かなかったり、不安定になる原因になります。
特に、電源の取り方やGNDの接続を誤ると、動作しない・ガタつくといったトラブルが発生しやすいポイントです。
本記事では、最終的な回路構成とあわせて、初心者が間違えやすい配線ポイントを分かりやすく解説しています。
👇 本記事の回路をそのまま再現したい方は、この手順に沿って回路を組んでください。
その⑤_プログラム

本記事では、PS4コントローラーを使ってロボットアームを操作するための基本プログラムと、その実装方法について解説しています。
ここまでの手順でロボットアームは完成し、上の動画のように実際に動かせるようになります。また、コントローラーを使って操作することも可能になります。
さらに操作性を高めたい方は、STEP2の⑦(プログラム改良・円筒座標系)もおすすめです。
👇 まずはロボットアームを完成させたい方は、ここまで進めてください。
◆◆◆ STEP2_実用化編:安定して動かす ◆◆◆
上の動画のロボットアームは、STEP1_基礎編までで再現できます。
ここから先はプラスアルファの内容になりますが、ロボットアームをより安定して動かしたり、使いやすくするための改良を紹介しています。
必須ではありませんが、より快適に使いたい方はぜひ参考にしてみてください。
その⑥_サーボ交換と電源強化

ロボットアームはSTEP1の状態でも動かすことはできますが、実際に動かしてみるとサーボがプルプルする(ハンチング)・ガタつく(電流不足)といった現象が気になることがあります。
本記事では、サーボの交換や電源強化を行うことで、ロボットアームをより安定して動かすための改善方法を解説しています。
必須ではありませんが、動作の安定性を高めたい方はぜひ参考にしてみてください。
その⑦_プログラム更新
STEP1のプログラムでもロボットアームを操作することはできますが、本記事ではさらに操作しやすくするためのプログラム改良について解説しています。
円筒座標系の考え方を取り入れることで、より直感的に操作できるようになります。
必須ではありませんが、操作性を高めたい方はぜひ参考にしてみてください。
その⑧_円筒座標系の逆運動学
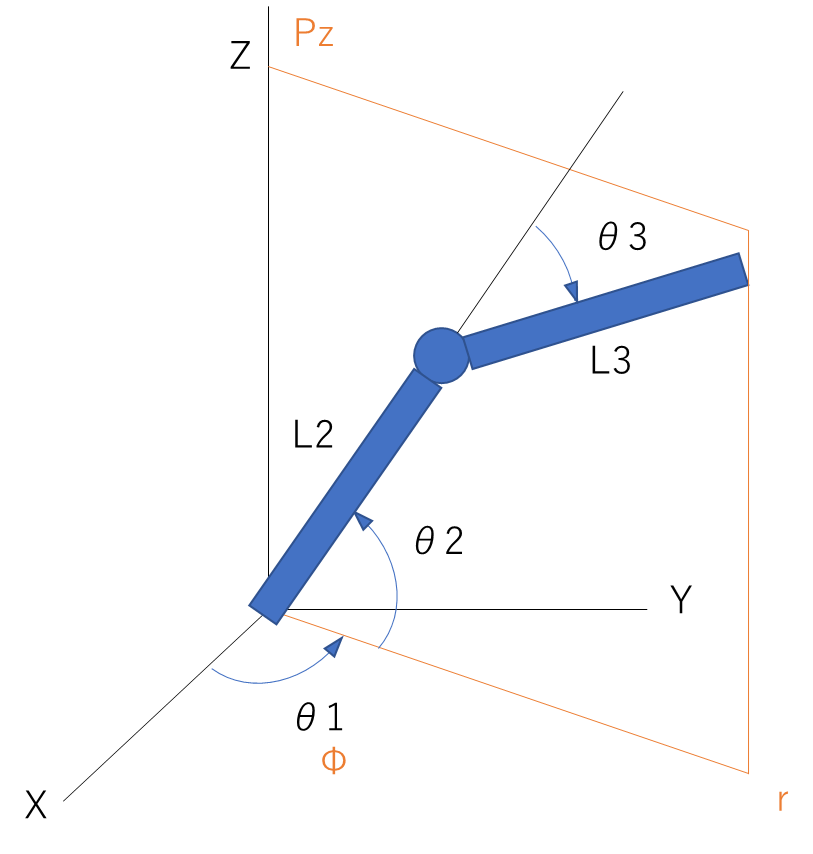
本記事では、ロボットアームを直感的に動かすために使用している「円筒座標系」と「逆運動学」の考え方について解説しています。
プログラムの仕組みを理解することで、動きを調整したり、応用的な制御にも対応できるようになります。
必須ではありませんが、仕組みから理解したい方は参考にしてみてください。
◆◆◆ STEP3_応用編:自在に動かす ◆◆◆
STEP3では、ロボットアームをさらに発展させた応用的な使い方を紹介していきます。
ChatGPTとローカルLLMでロボットアームを動かしてみた
こちらはAIと連携してロボットアームを操作する方法(音声操作)を解説した記事です。
ChatGPTなどの有料のAPIを利用する方法と自宅のPCを利用する方法を紹介しています。

◆◆◆ Extra_おまけ編:カスタムして遊ぶ ◆◆◆
改造①_ロボットアームにドラゴンの頭をつけてみた
ロボットアームのグリップ部分をドラゴンの頭部に変更してみた、おまけカスタム記事です。
見た目を変えるだけでも操作の楽しさが大きく変わり、ロボットアームらしさが一気にアップします。
👇 自分だけのロボットアームにカスタムしてみたい方は、ぜひ参考にしてみてください。
このシリーズの他の記事
シリーズ全体の概要はこちらの記事で紹介しています。

| この記事のシリーズ一覧 | |
| ◆◆◆ STEP1_基礎編:とにかく動かす ◆◆◆ | |
| その① | コスパ最強!? ロボットアームの作り方_その① |
| その② | コスパ最強!?ロボットアームの作り方_その②__テスト回路の作り方 |
| その③ | コスパ最強!?ロボットアームの作り方_その③_機構部の組み立て方 |
| その④ | コスパ最強!?ロボットアームの作り方_その④_回路部分の作り方 |
| その⑤ | コスパ最強!?ロボットアームの作り方_その⑤_プログラム |
| ◆◆◆ STEP2_実用化編:安定して動かす ◆◆◆ | |
| その⑥ | コスパ最強!?ロボットアームの作り方_その⑥_サーボ交換と電源強化 |
| その⑦ | コスパ最強!?ロボットアームの作り方_その⑦_プログラム更新 |
| その⑧ | コスパ最強!?ロボットアームの作り方_その⑧_円筒座標系の逆運動学 |
| ◆◆◆ STEP3_応用編:自在に動かす ◆◆◆ | |
| ChatGPTとローカルLLMでロボットアームを動かして見た! | |
| ◆◆◆ Extra_おまけ編:カスタムして遊ぶ ◆◆◆ | |
| おまけ① | ロボットアームにドラゴンの頭をつけてみた |
この記事は、その①です。
必要な部品一覧
| Amazonリンク | 購入にあたって解説 | |
| ① | ロボットアーム | 在庫切れの場合はこちら (思いのほか多くの方に購入していただいたようで 在庫切れの場合があるようです。) |
| ② | Arduino 本体 | ②’を購入の場合不要。 |
| ②’ | Arduino学習キット(②、⑦、⑨セット) | ②、⑦、⑨セット こちらをおすすめします。 |
| ③ | PS4 コントローラー 純正新品 | |
| ④ | Arduino USB shield | 在庫切れの場合はこちら |
| ⑤ | USB Bluetooth アダプタ | 技適マークあり(日本で使用OKです。) |
| ⑥ | モータードライバー | |
| ⑦ | Arduino 用ワイヤーゲージ | ②’を購入の場合不要。 |
| ⑦⁺ | サーボ延長ケーブル | +αであると配線がすっきりします。 |
| ⑧ | ACアダプター | |
| ⑨ | モータードライバー用電源モジュール | ②’を購入の場合不要。 |
| ⑩ | クリップ | 普通のクリップ1個あればOKです。 |
| ⑪ | 木板 | ホームセンターに売っているものでOKです。 30cm×20cm程度。 |
| ⑫ | タッピングねじ M3×10 | これもホームセンターに売っているものでOKです。 |
コメント