
回路部の作り方
今回の記事では、最終的な回路を作っていきます。
テスト用に作った下記回路を改造していくので、先にこちらの記事を読んでください。

コスパ最強!?ロボットアームの作り方_その②_テスト回路の作り方
テスト回路の作成ロボットアームを組み立てる前に、動画のようにサーボモーターを動かしてみます。このロボットアームは、サーボモーターと呼ばれる角度で制御できるモーターを使用しています。そのため、組み立て時にモーターの角度を位置決めしておかないと...
www.jijis-blog.com
2022.07.16
USBシールドの取り付け
回路の改造は、PS4コントローラーとの通信用にUSBシールドを装着するだけです。
手順があるので、一つずつ解説していきます。
USBシールドのはんだ付け
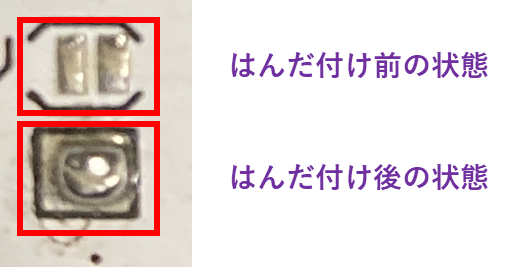
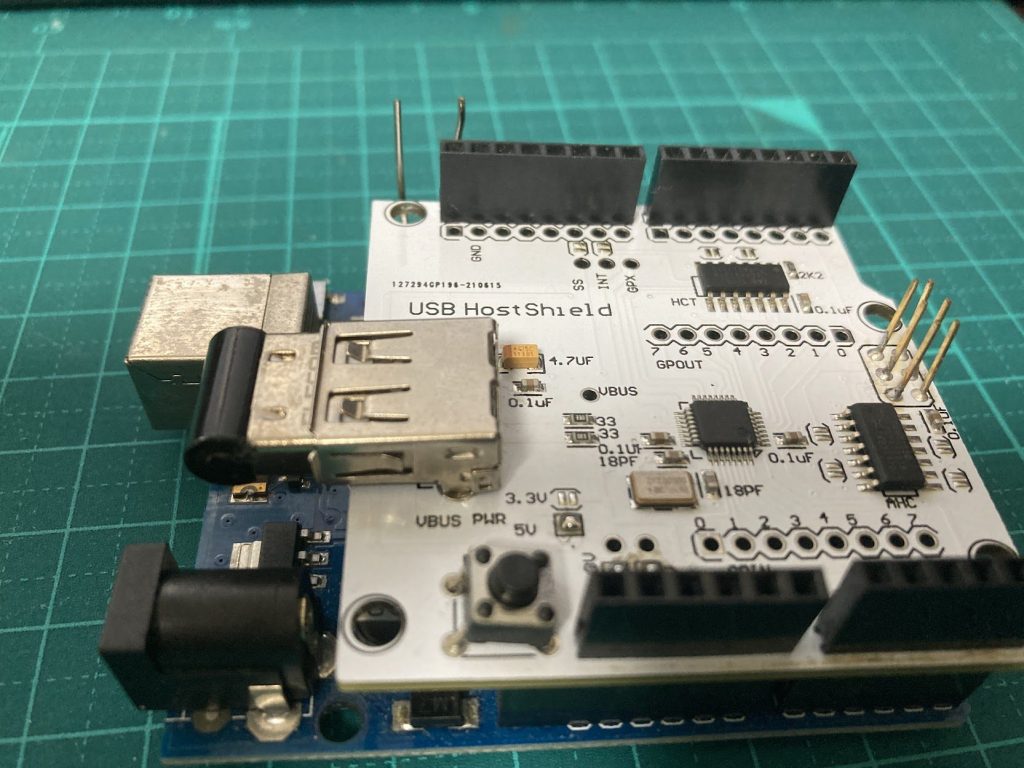
USBシールドを5V仕様にするため、画像のように3箇所はんだづけします。
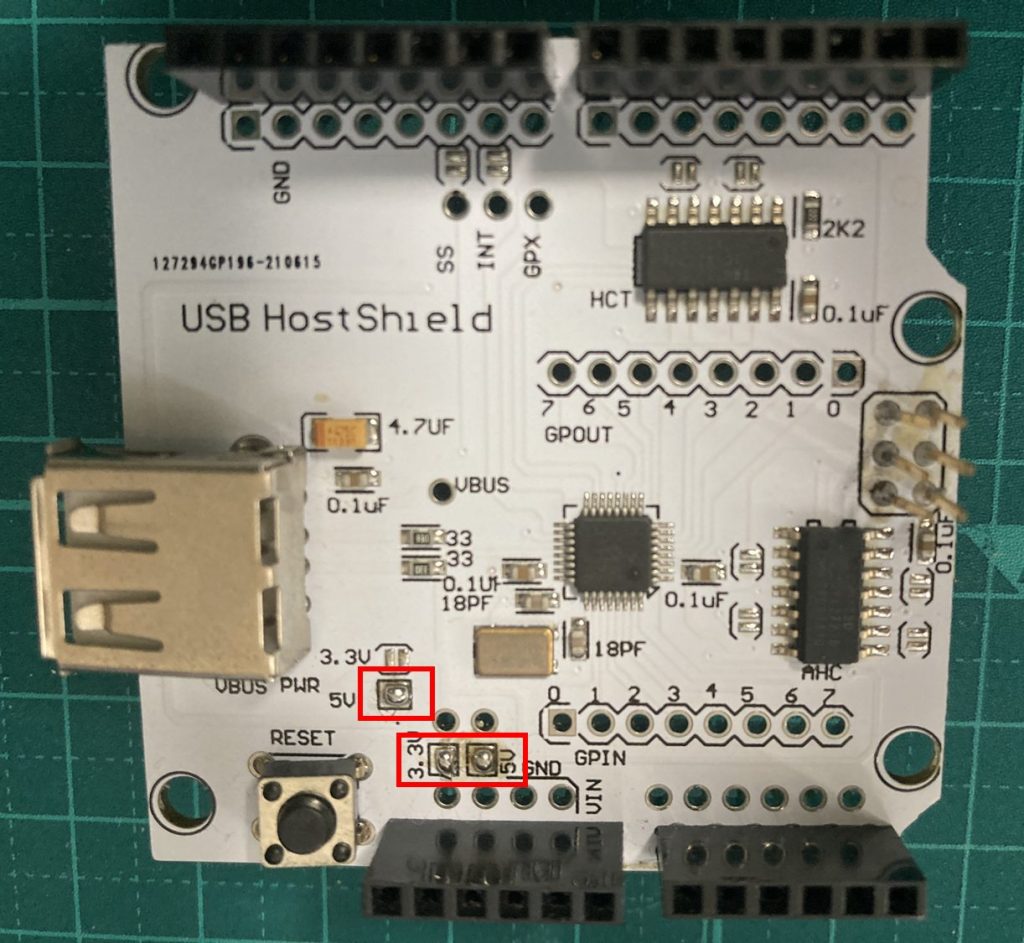
離れているはんだをくっつけるようにはんだ付けすることで、導通状態になります。
これをしないと動かないので注意してください。
クリップの取り付け
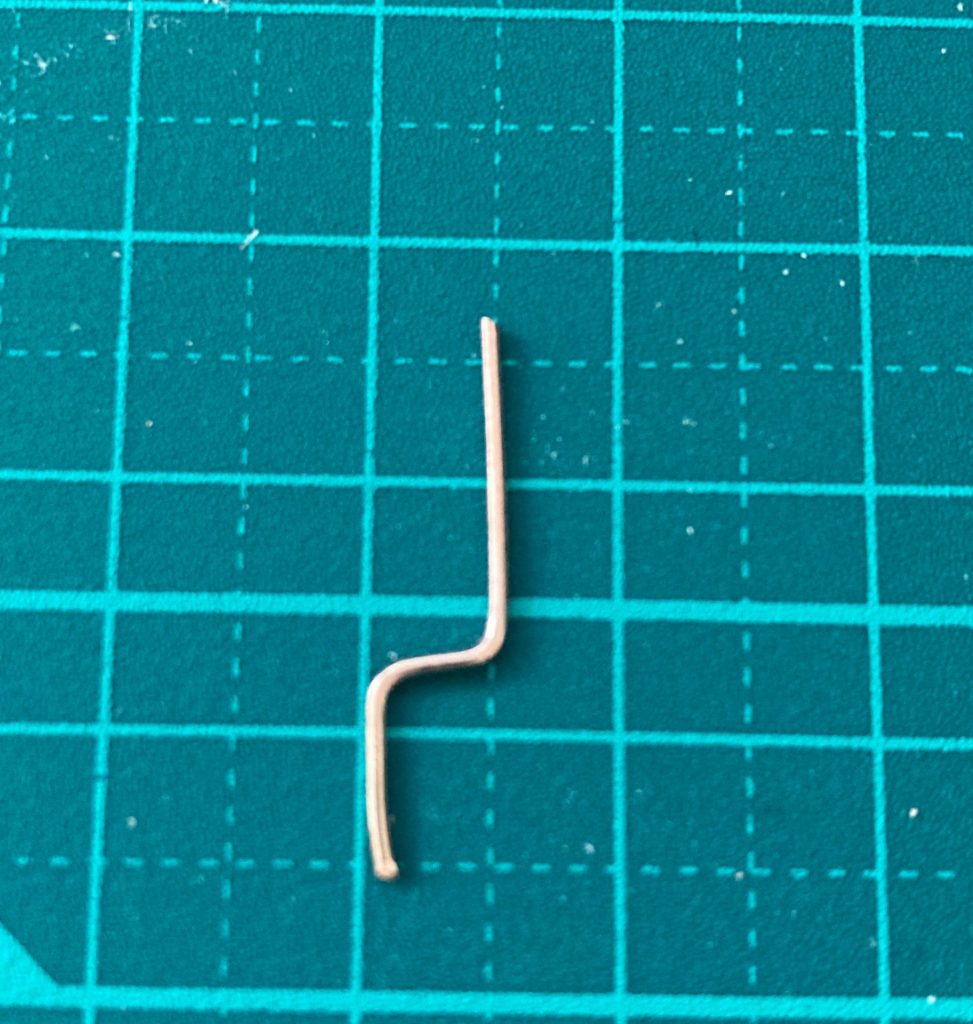
このUSBシールドを使うとサーボモーターを制御しているSCLピン、SDAピンが隠れてしまうので、
クリップでピンを引き出します。
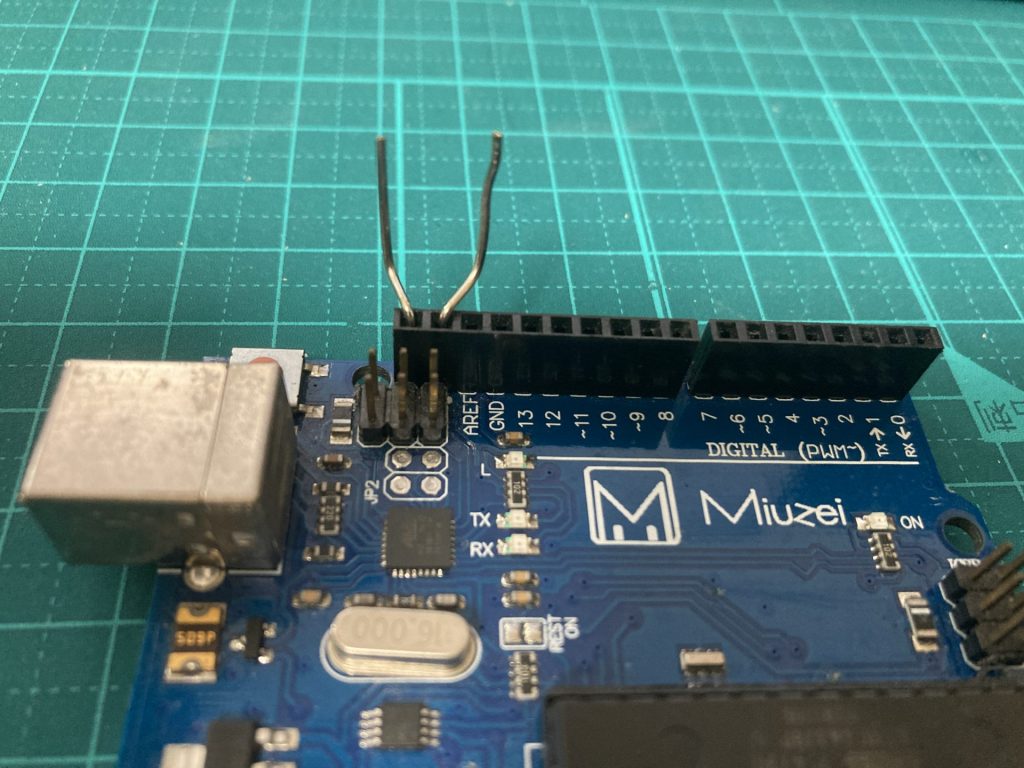
画像のようにクリップを加工し、2つ同じ形状のものを作ります。
取り付けるとこんな感じです。
USBシールドの取り付け
USBシールドを取り付けると画像のような出来上がりになります。
USBトングルも取り付ければ、完成です。
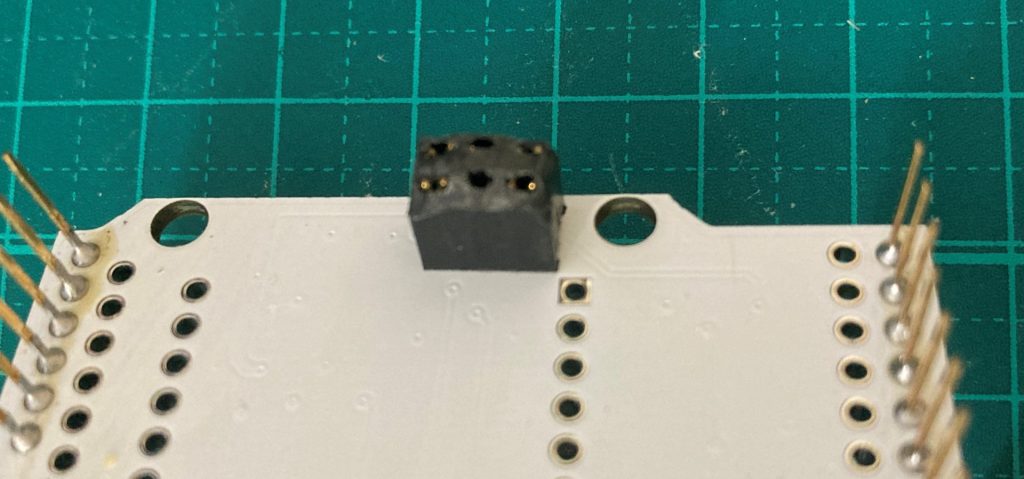
差し込み時の注意点として、後ろの差し込み穴がきちんとはまってくれないことがあります。
その時は、画像のようにニッパーでプラスチックの部分を少しカットすると綺麗にはまってくれます。
サーボモーター配線
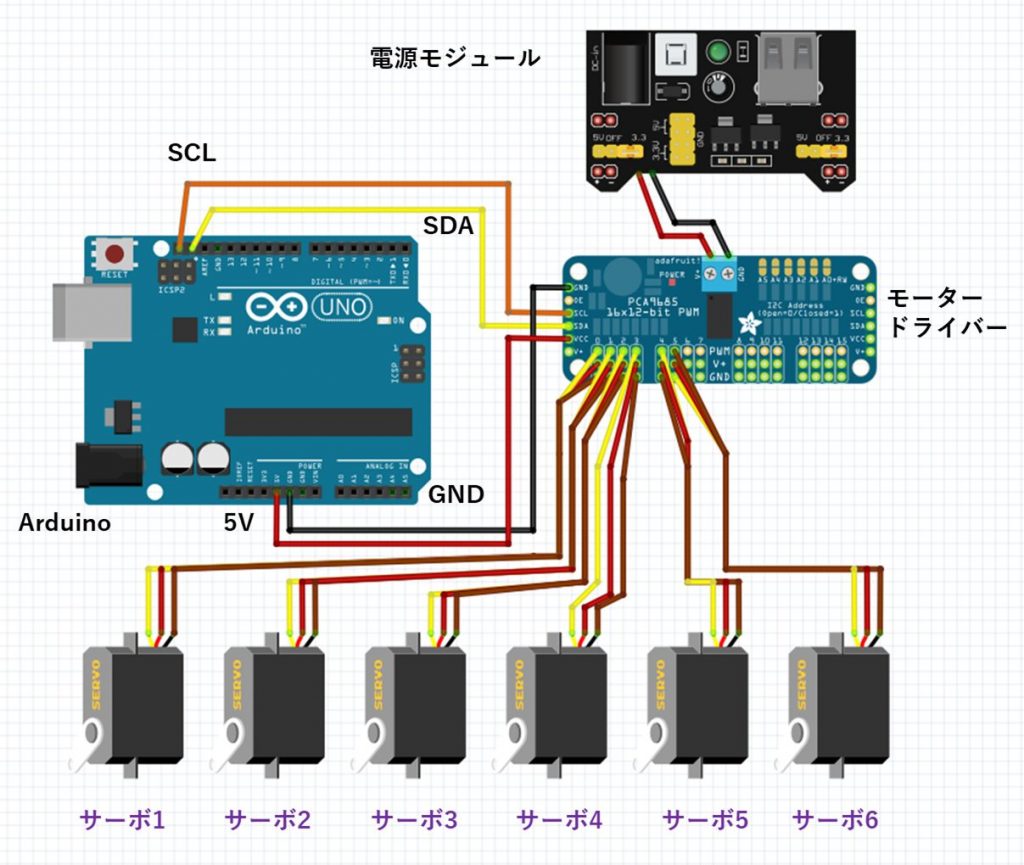
回路が完成したので、サーボモーターとモータードライバーを画像のように配線します。
モータードライバーのピン番号は0から始まっているので、ピン番号0をサーボモーター1、ピン番号1をサーボーモーター2・・・のように接続してください。
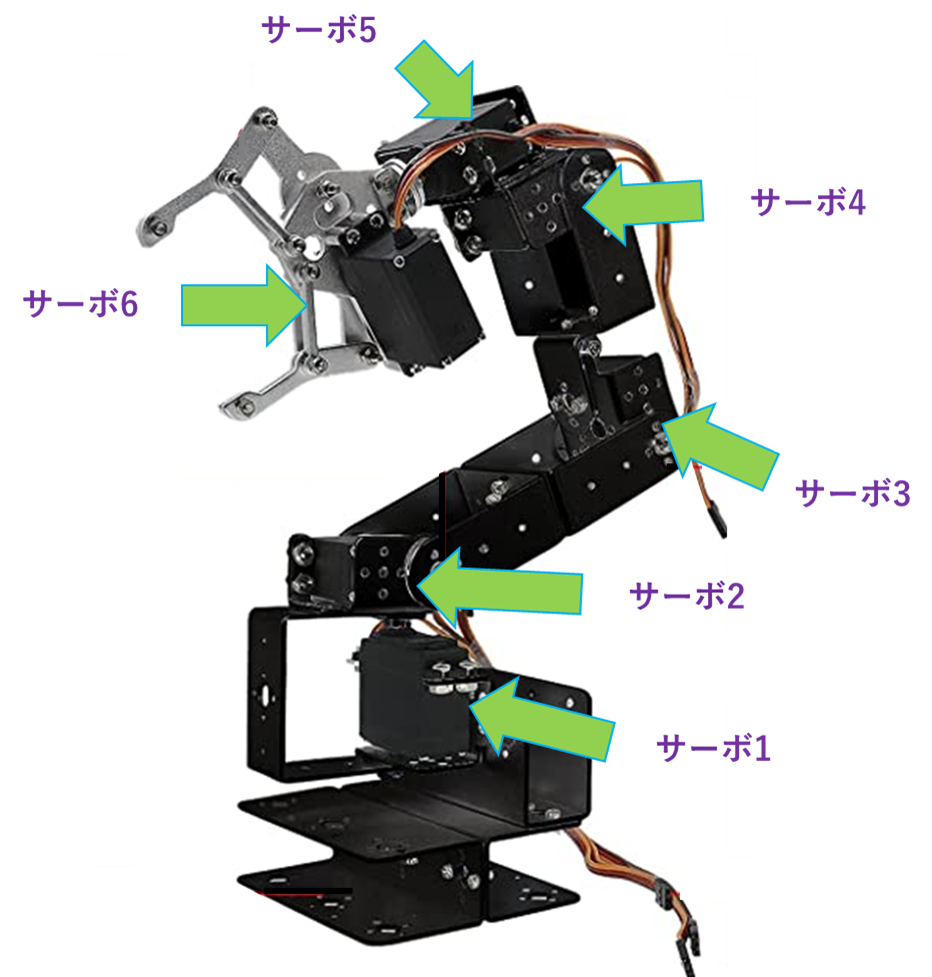
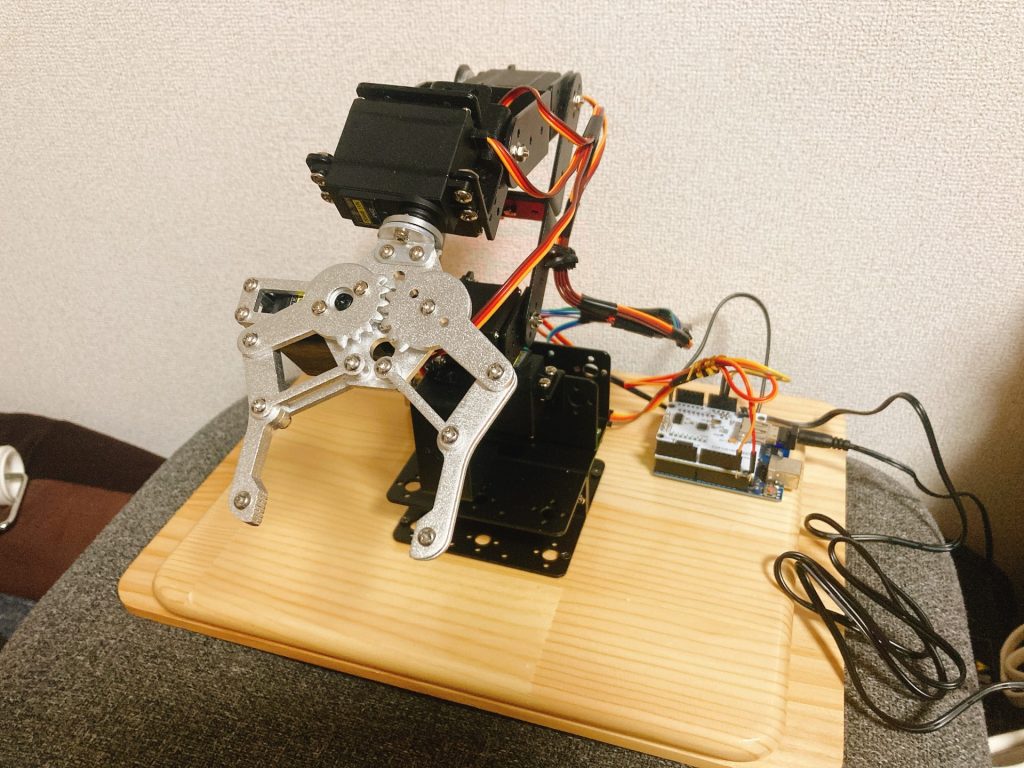
ロボットアームの固定
ロボットアームは、画像のように木板などに固定してください。
このロボットアームは、それなりにパワーがあるので、固定しないと自分の力で、吹っ飛んでいきます(笑)
これで、組み立ては終わりです。次回からは、プログラムについて解説していきます。
このシリーズの他の記事
| この記事のシリーズ一覧 | |
| ◆◆◆ STEP1_基礎編:とにかく動かす ◆◆◆ | |
| その① | コスパ最強!? ロボットアームの作り方_その① |
| その② | コスパ最強!?ロボットアームの作り方_その②__テスト回路の作り方 |
| その③ | コスパ最強!?ロボットアームの作り方_その③_機構部の組み立て方 |
| その④ | コスパ最強!?ロボットアームの作り方_その④_回路部分の作り方 |
| その⑤ | コスパ最強!?ロボットアームの作り方_その⑤_プログラム |
| ◆◆◆ STEP2_実用化編:安定して動かす ◆◆◆ | |
| その⑥ | コスパ最強!?ロボットアームの作り方_その⑥_サーボ交換と電源強化【近日公開予定】 |
| その⑦ | コスパ最強!?ロボットアームの作り方_その⑦_プログラム更新 |
| その⑧ | コスパ最強!?ロボットアームの作り方_その⑧_円筒座標系の逆運動学 |
| ◆◆◆ STEP3_応用編:自在に動かす ◆◆◆ | |
| 準備中 | |
| ◆◆◆ Extra_おまけ編:カスタムして遊ぶ ◆◆◆ | |
| おまけ① | ロボットアームにドラゴンの頭をつけてみた |
この記事は、その④です。
必要な部品一覧
このロボットアームを作るのに必要な部品一覧とその役割を下記記事にまとめてみました!


ロボットアーム_部品一覧
部品一覧これから紹介するロボットアームの部品合計額は、約2万3千円です。(2022/3/27)頑丈な作りのロボットアームなので、コスパは良いと思います!学習用等にお使いください!ロボットアームの作り方はこちらの記事をご覧ください。部品表①ロ...
www.jijis-blog.com
2022.03.29
| Amazonリンク | 購入にあたって解説 | |
| ① | ロボットアーム | 在庫切れの場合はこちら (思いのほか多くの方に購入していただいたようで 在庫切れの場合があるようです。) |
| ② | Arduino 本体 | ②’を購入の場合不要。 |
| ②’ | Arduino学習キット(②、⑦、⑨セット) | ②、⑦、⑨セット こちらをおすすめします。 |
| ③ | PS4 コントローラー | |
| ④ | Arduino USB shield | 在庫切れの場合はこちら |
| ⑤ | USB Bluetooth アダプタ | 技適マークあり(日本で使用OKです。) |
| ⑥ | モータードライバー | |
| ⑦ | Arduino 用ワイヤーゲージ | ②’を購入の場合不要。 |
| ⑦⁺ | サーボ延長ケーブル | +αであると配線がすっきりします。 |
| ⑧ | ACアダプター | |
| ⑨ | モータードライバー用電源モジュール | ②’を購入の場合不要。 |
| ⑩ | クリップ | 普通のクリップ1個あればOKです。 |
| ⑪ | 木板 | ホームセンターに売っているものでOKです。 30cm×20cm程度。 |
| ⑫ | タッピングねじ M3×10 | これもホームセンターに売っているものでOKです。 |
コメント