
ロボットアームのプルプル問題とガタガタ問題の対策
サーボモーターを扱う際に問題になりやすいのが
・プルプルする問題(ハンチング)
・ガタガタする問題(電流不足・ノイズ)
です。
今回は、実際にロボットアームで発生した事例と対策をまとめました。
プルプルする問題(ハンチング)
ロボットアームを使用していると下の動画のように静止時にプルプル動くような問題が起きることがあります。
プルプル時
改善後
原因は、ざっくりいうとサーボの精度であり、具体的には以下のような要因です。
・制御の荒さ
・ギアの遊び
・デッドバンドの狭さ
今回のロボットアームで使用しているMG996Rなどの安価サーボは 位置を保持しようとして
細かく修正動作を繰り返すため、微振動が発生します。
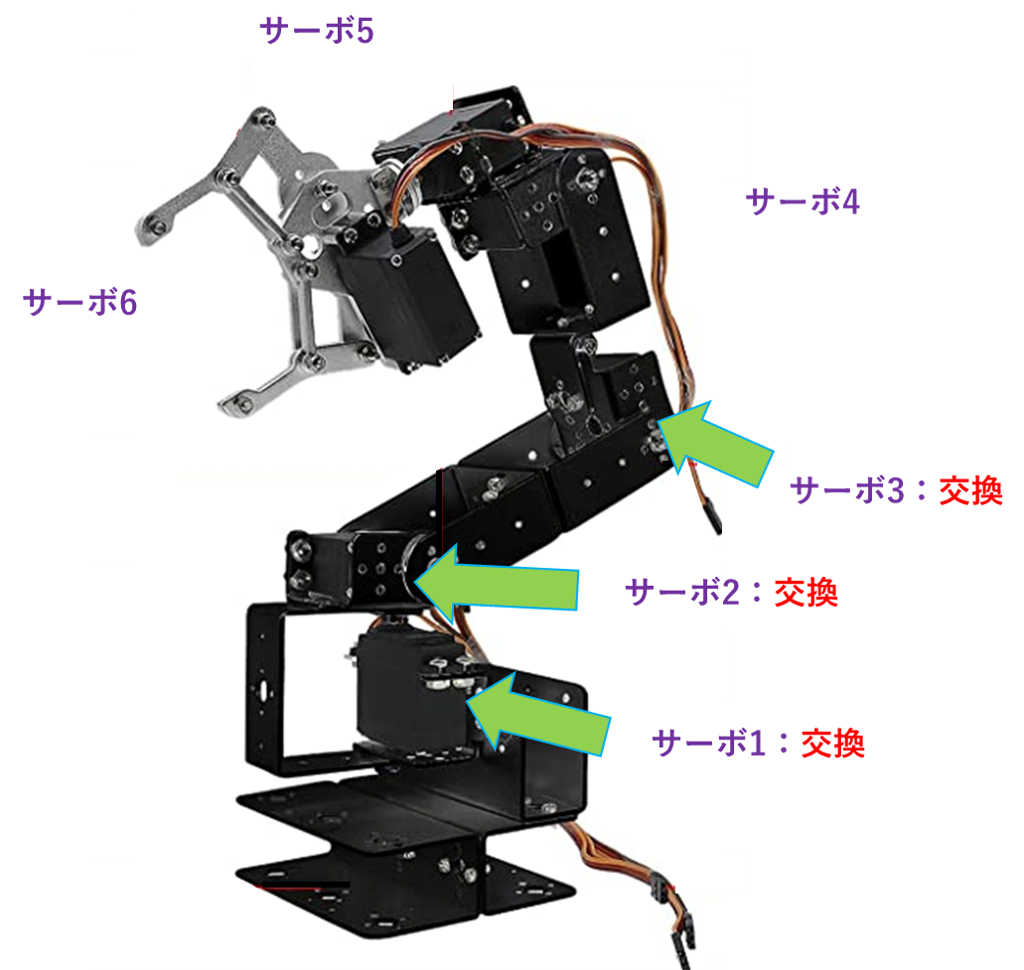
対策として、DS3218(デジタルサーボ)へ交換すると 制御が安定するため、完全に停止するようになります。
負荷のかかりやすい
- 胴体
- 肩
- 肘
の3か所を交換するだけでも、改善後の動画のように動作が滑らかになり、大きく改善します。
改善箇所
ガタガタ問題(電流不足・ノイズ)
ロボットアームを使用していると下の動画のようにサーボのパワーが不足して、ガタガタすることがあります。
ガタガタ時
改善後
原因は、電源の電流不足とノイズです。
今回のロボットアームで使用しているMG996Rのストール電流(瞬間的に要求される最大電流)は
約1.4Aで、単純に計算すると6個使用する場合は、瞬間的に8A以上必要になります。
今回の検証では、ロボットアームに使用しているACアダプター電源 5V4Aをサーボモーター
2個の条件で再現しました。
再現条件
- 電源の設定:最大電圧:5V、最大電流:1.3A (4A ÷ 6個 × 2個)
※実際には同時に全サーボが最大電流を流すわけではありませんが、
電源容量を単純化して再現しています。) - 負荷:
サーボモーター1:450g×10cm 、静止 (奥側)
サーボモーター2:200g×10cm、上下運動 (手前側)(MG996Rで固定)
結果 、サーボモーター1をMG996Rとした場合では、電流不足により 「カクン、カクン」とした
動作が発生。
一方 、サーボモーター1をDS3218とした場合では、改善後の動画ように同条件でも静止できました。
理由は 、DS3218はデジタル制御で電流の立ち上がりが緩やかなので、MG996Rに比べると電圧降下に強いためです。
ただし、複数サーボを激しく動かす場合は、やはり電源不足になります。
通常の利用用途では、紹介しているACアダプタでも問題ありませんが、激しい動きを想定されている場合は、直流安定化電源(6V 10A以上推奨) の導入をおすすめします。
まとめると、通常の動作範囲であれば、プルプル問題、ガタガタ問題ともに以下3箇所のサーボモーターの変更で解決します。
負荷の高い動作や激しい動作を予定している場合は、直流安定化電源の購入をおすすめします。
対策部品
サーボモータ:DS3218

直流安定化電源

このシリーズの他の記事
シリーズ全体の概要はこちらの記事で紹介しています。

| この記事のシリーズ一覧 | |
| ◆◆◆ STEP1_基礎編:とにかく動かす ◆◆◆ | |
| その① | コスパ最強!? ロボットアームの作り方_その① |
| その② | コスパ最強!?ロボットアームの作り方_その②__テスト回路の作り方 |
| その③ | コスパ最強!?ロボットアームの作り方_その③_機構部の組み立て方 |
| その④ | コスパ最強!?ロボットアームの作り方_その④_回路部分の作り方 |
| その⑤ | コスパ最強!?ロボットアームの作り方_その⑤_プログラム |
| ◆◆◆ STEP2_実用化編:安定して動かす ◆◆◆ | |
| その⑥ | コスパ最強!?ロボットアームの作り方_その⑥_サーボ交換と電源強化 |
| その⑦ | コスパ最強!?ロボットアームの作り方_その⑦_プログラム更新 |
| その⑧ | コスパ最強!?ロボットアームの作り方_その⑧_円筒座標系の逆運動学 |
| ◆◆◆ STEP3_応用編:自在に動かす ◆◆◆ | |
| ChatGPTとローカルLLMでロボットアームを動かして見た! | |
| ◆◆◆ Extra_おまけ編:カスタムして遊ぶ ◆◆◆ | |
| おまけ① | ロボットアームにドラゴンの頭をつけてみた |
コメント