
テスト回路の作成
ロボットアームを組み立てる前に、動画のようにサーボモーターを動かしてみます。
このロボットアームは、サーボモーターと呼ばれる角度で制御できるモーターを使用しています。
そのため、組み立て時にモーターの角度を位置決めしておかないと後々制御できなくなってしまいます。
あらかじめ位置決めしておくと効率よく組み立てられるので、今回はサーボモーターの位置決め用回路を作ります。
テスト回路ではありますが、この回路を流用して、最終的な制御回路を作るので、飛ばさずに読んでくださいね(笑)
今回使用するもの
テスト回路作成では、主に下記4つの部品を使用します。
以下のサーボモーターは、比較的大きな電流を流さないと動かないので、Arduinoからの電力供給だけでは足りません。
そこで、モータードライバーを使用します。
・Arduino

・モータードライバー

・サーボモーター

・モータードライバー用電源モジュール

上記部品は、部品一覧として記事の最後にまとめていますので、購入の際は、そちらもご覧ください。
※サーボモーターは、ロボットアームの中にあるものを使用しています。
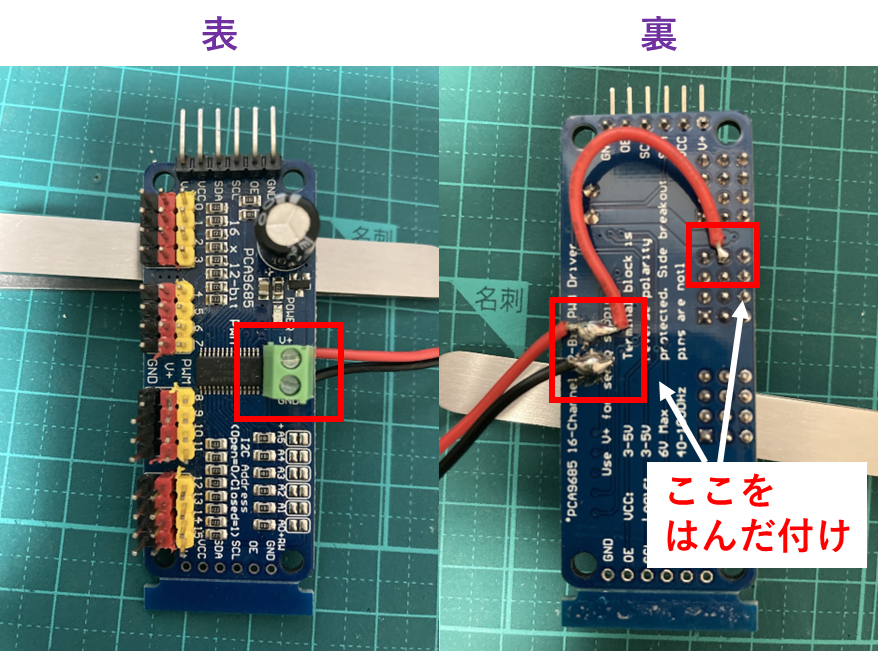
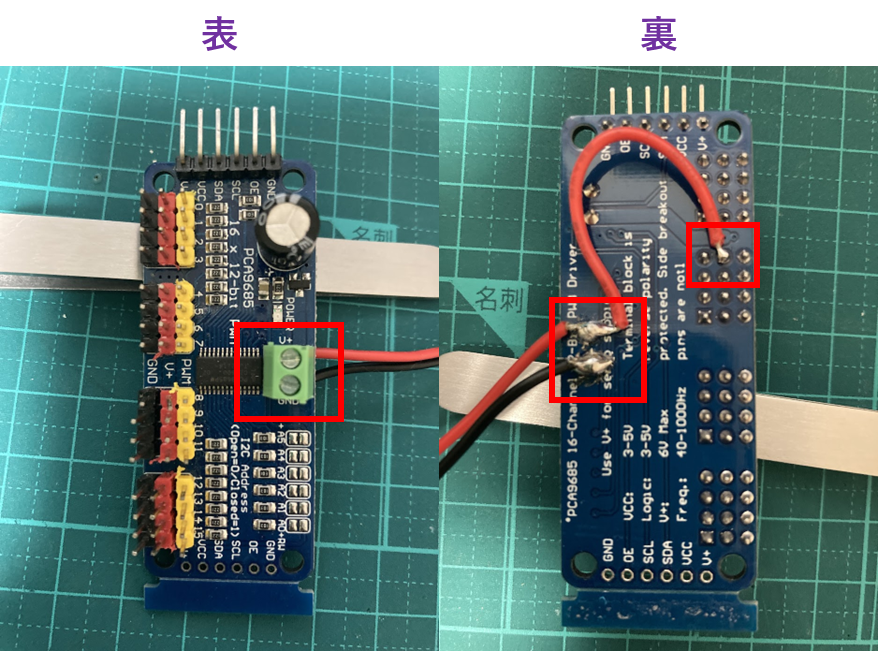
モータードライバーのはんだ付け
Amazonのレビューにも書いてありますが、今回紹介しているモータードライバーは、時々接触不良のものが送られてくるようです。
私も接触不良の製品が送られてきました(笑)
しかし、簡単に直せるので、安心してください。
テスタで測定をしたところ、どうやら外部電源ラインが途中で断線しているようです。
下の図のようにはんだ付けを行うことで問題なく使えますよ!
(はんだ付け箇所は画像の裏面、赤の電線です。)
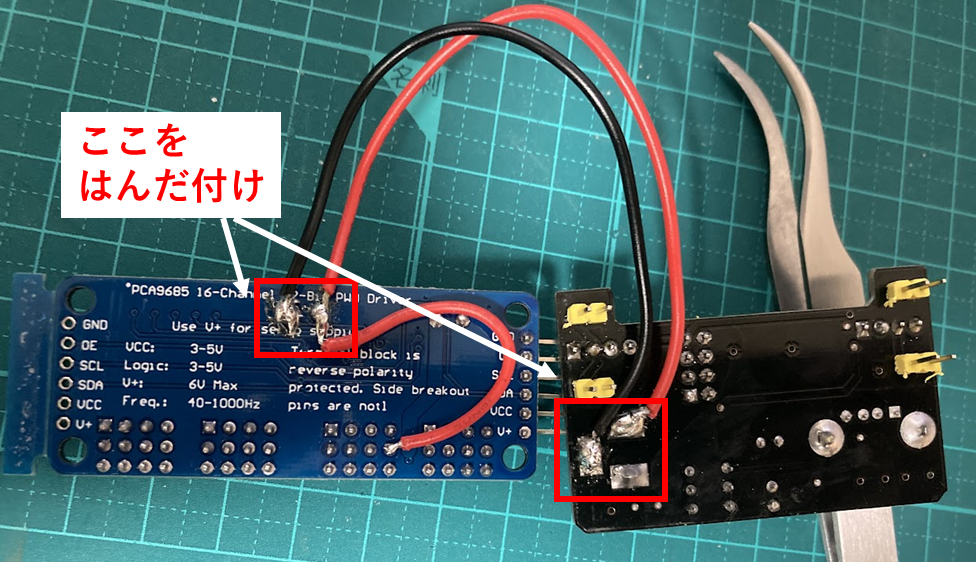
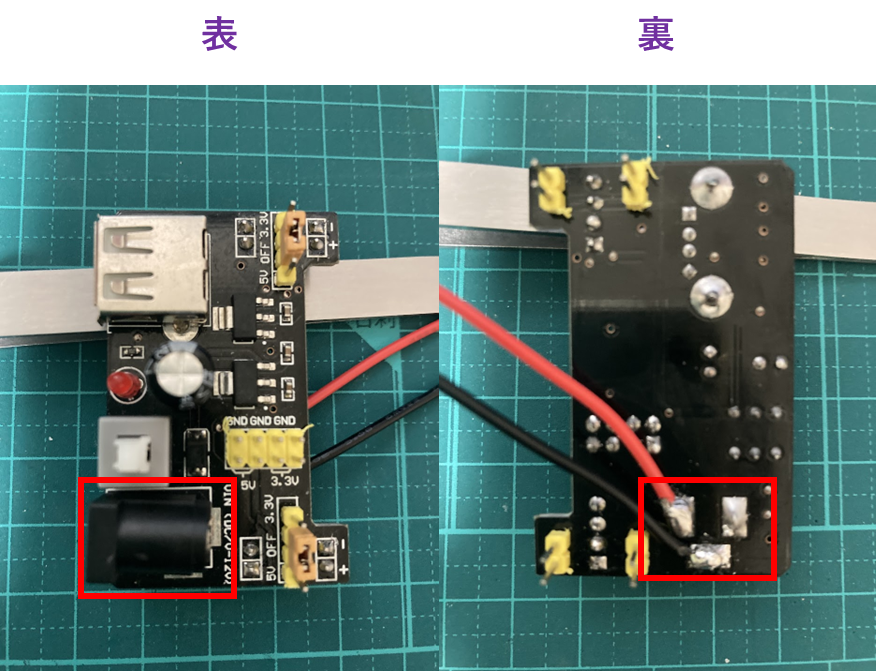
ドライバーと電源モジュールのはんだ付け
次はモータードライバーと電源モジュールのはんだ付けです。
赤と黒の電線をはんだ付けしてください。
(電線は色が逆にならないように気を付けてください。)
配線
Arduino、サーボモーター、モータードライバー、電源モジュールを下の図のように配線していきます。
これで、Aruinoからサーボモーターを制御する準備ができました。
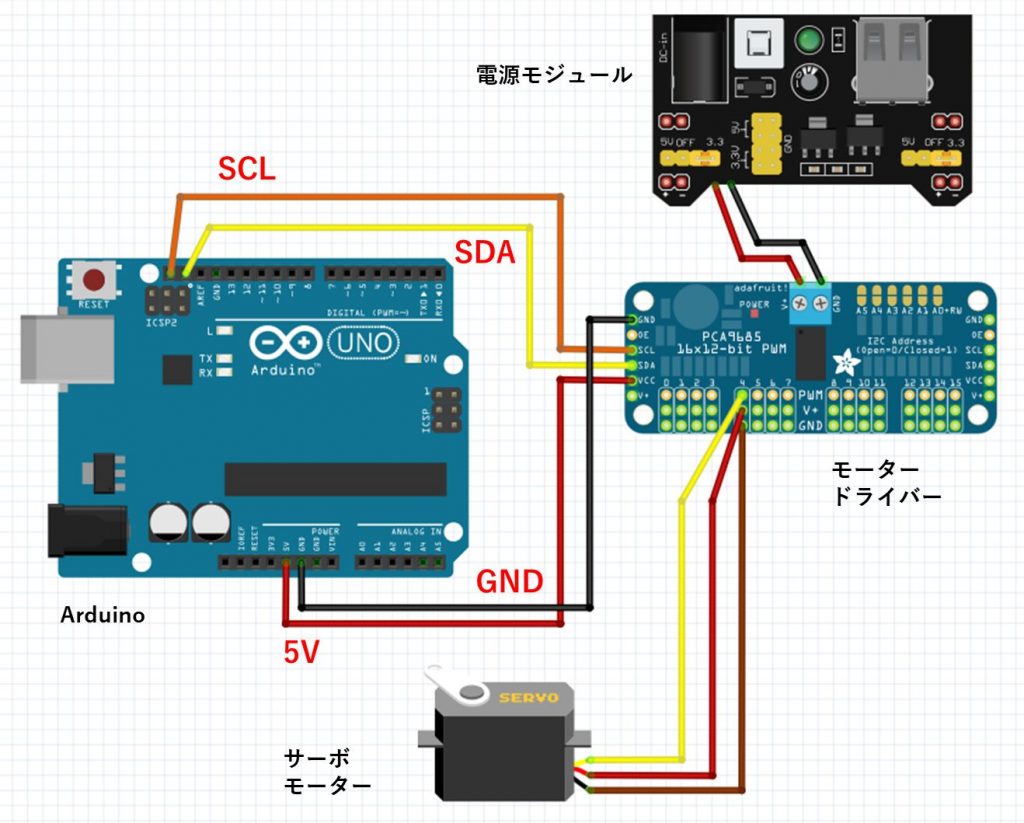
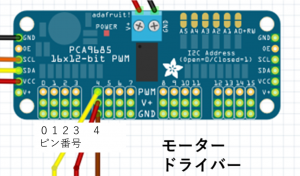
※モータードライバーのピン番号は0ピンから始まっているので注意してください。
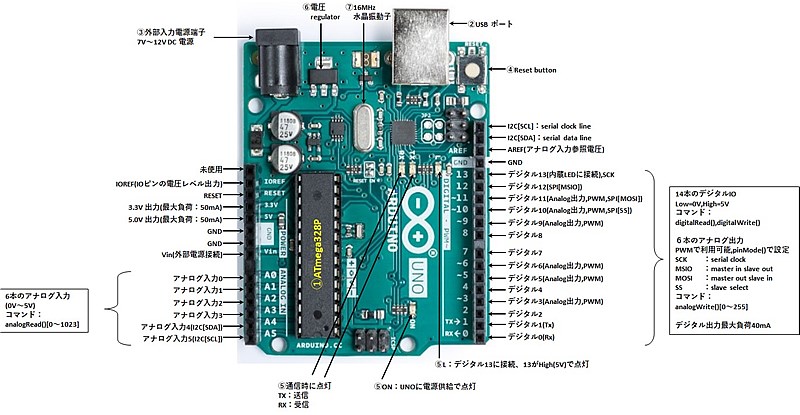
Arduinoのインストール&実行方法について
Arduinoは、プログラムを実行することで、サーボモーター等を動かすロボットの頭脳の部分です。
Arduinoにプログラムを記述する方法は、下記サイトで詳しく解説されていますので、そちらをご覧ください。
◆インストール方法

◆プログラムの実行方法(チュートリアル)

位置決めプログラム
Arduinoに以下プログラムを書き込むことで、サーボモーターを90°に位置決めします。
モータードライバーのチャンネル1に繋ぐと動画のように動き、チャンネル4に繋ぐと組み立て用に位置決めします。
ライブラリ
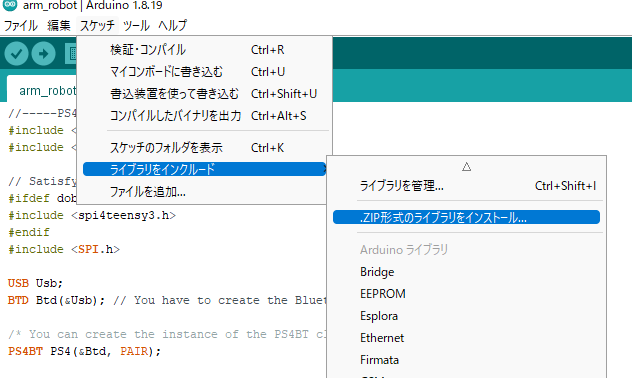
モータードライバー用のライブラリは下記からダウンロードできます。

ダウンロード後は、画像のように
スケッチ → ライブラリをインクルード → .zip形式のライブラリをインストール
で先ほどダウンロードしたzipファイルを選択してください。
プログラム
#include <PCA9685.h> //PCA9685用ヘッダーファイル
PCA9685 pwm = PCA9685(0x40); //PCA9685のアドレス指定
#define SERVOMIN 150 //最小パルス幅
#define SERVOMAX 500 //最大パルス幅
void setup() {
pwm.begin(); //初期設定 (アドレス0x40用)
pwm.setPWMFreq(50); //PWM周期を50Hzに設定 (アドレス0x40用)
}
//メインループ
void loop() {
//4chチャンネルのサーボモーターを90度に位置決め(組み立て用)
servo_write(4,90);
delay(500);
//1chチャンネルのサーボモーターを90度から180度動かす(動き確認用)
servo_write(1,180);
delay(1000);
servo_write(1,90);
delay(1000);
}
//サーボモーター駆動用関数 チャンネルと角度を指定
void servo_write(int ch, int ang){
ang = map(ang, 0, 180, SERVOMIN, SERVOMAX); //角度(0~180)をPWMのパルス幅(150~500)に変換
pwm.setPWM(ch, 0, ang); //サーボモーター駆動
}Arduinoの動かし方から学びたい方へ
Arduinoの動かし方等、プログラミングから学びたい方にはUdemyをおすすめします。
私も社会人になってからHTML、CSS、Javascript、PHPを勉強しましたが、その時も有料の動画受講サービスを使って学習するのが効率が良かったです。
忙しい社会人からすると動画で勉強できるのは非常にありがたいです。
・習いごととしては価格が安い。(合宿や対面などの習いごとより安いです)
・動画で受講できるので、自分のペースで学習できる。(倍速設定もあり)
・受講期間はないため、何度でも受講できる。
・隙間時間を活用できる。
・コースごとに評価も見れるため、学習内容を信用できる。
アルディーノマイコンと電子工作入門【Udemy】
| 講座名 | アルディーノマイコンと電子工作入門 |
| おすすめ度 | ★★★★☆ (4.5) |
| 対象者 | マイコンの初心者・入門者。電子工作の初心者・入門者。 マイコンのプログラミングをこれから始めたい人。 電子工作をこれから始めたい人。 |
| 料金 | 13,800円 セール時 1,600円 |
| 時間 | 4.5時間 |
| 学習内容 | 新バージョンのアルディーノIDE2.0に対応! Arduino(アルディーノ)のマイコンボードを使って電子工作を学びます。 マイコンボードでLEDを点灯したり、センサーを使って測定したり、音を鳴らしたり、サーボモータを回したりします。 |
参考サイト
この記事の作成にあたって以下のサイトを参考にさせていただきました。



このシリーズの他の記事
シリーズ全体の概要はこちらの記事で紹介しています。

| この記事のシリーズ一覧 | |
| ◆◆◆ STEP1_基礎編:とにかく動かす ◆◆◆ | |
| その① | コスパ最強!? ロボットアームの作り方_その① |
| その② | コスパ最強!?ロボットアームの作り方_その②__テスト回路の作り方 |
| その③ | コスパ最強!?ロボットアームの作り方_その③_機構部の組み立て方 |
| その④ | コスパ最強!?ロボットアームの作り方_その④_回路部分の作り方 |
| その⑤ | コスパ最強!?ロボットアームの作り方_その⑤_プログラム |
| ◆◆◆ STEP2_実用化編:安定して動かす ◆◆◆ | |
| その⑥ | コスパ最強!?ロボットアームの作り方_その⑥_サーボ交換と電源強化 |
| その⑦ | コスパ最強!?ロボットアームの作り方_その⑦_プログラム更新 |
| その⑧ | コスパ最強!?ロボットアームの作り方_その⑧_円筒座標系の逆運動学 |
| ◆◆◆ STEP3_応用編:自在に動かす ◆◆◆ | |
| ChatGPTとローカルLLMでロボットアームを動かして見た! | |
| ◆◆◆ Extra_おまけ編:カスタムして遊ぶ ◆◆◆ | |
| おまけ① | ロボットアームにドラゴンの頭をつけてみた |
この記事は、その②です。
必要な部品一覧
| Amazonリンク | 購入にあたって解説 | |
| ① | ロボットアーム | 在庫切れの場合はこちら (思いのほか多くの方に購入していただいたようで 在庫切れの場合があるようです。) |
| ② | Arduino 本体 | ②’を購入の場合不要。 |
| ②’ | Arduino学習キット(②、⑦、⑨セット) | ②、⑦、⑨セット こちらをおすすめします。 |
| ③ | PS4 コントローラー 純正新品 | |
| ④ | Arduino USB shield | 在庫切れの場合はこちら |
| ⑤ | USB Bluetooth アダプタ | 技適マークあり(日本で使用OKです。) |
| ⑥ | モータードライバー | |
| ⑦ | Arduino 用ワイヤーゲージ | ②’を購入の場合不要。 |
| ⑦⁺ | サーボ延長ケーブル | +αであると配線がすっきりします。 |
| ⑧ | ACアダプター | |
| ⑨ | モータードライバー用電源モジュール | ②’を購入の場合不要。 |
| ⑩ | クリップ | 普通のクリップ1個あればOKです。 |
| ⑪ | 木板 | ホームセンターに売っているものでOKです。 30cm×20cm程度。 |
| ⑫ | タッピングねじ M3×10 | これもホームセンターに売っているものでOKです。 |
コメント