
ロボットアームの組み立て方
組み立て部品一覧
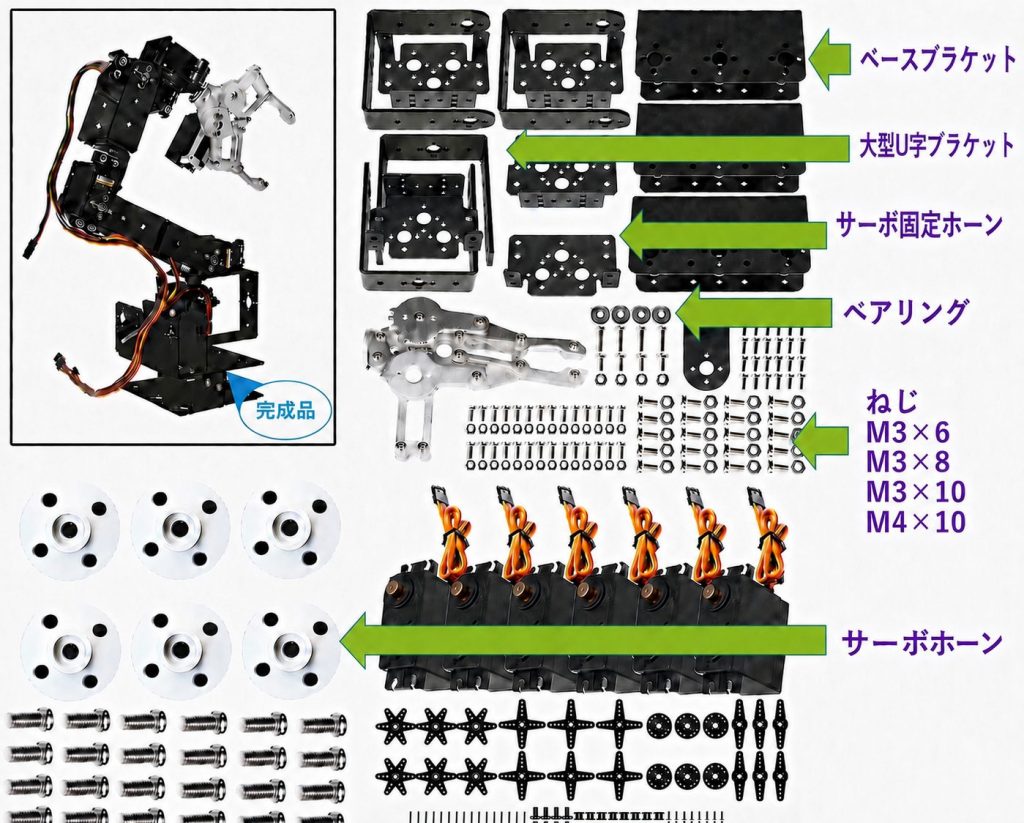
今回使用したロボットアームには、英語で記載された組み立てマニュアルが同梱されています。
しかし、このマニュアル、説明が不親切でとても組み立て難いです。
そこで、今回はロボットアームの組み立て方と組み立て時の注意点について、紹介したいと思います。
ねじについて
このマニュアルの不親切なところは、どこにどのねじを使えば良いかわかり難いことです。
そのため、まずはねじについて紹介したいと思います。
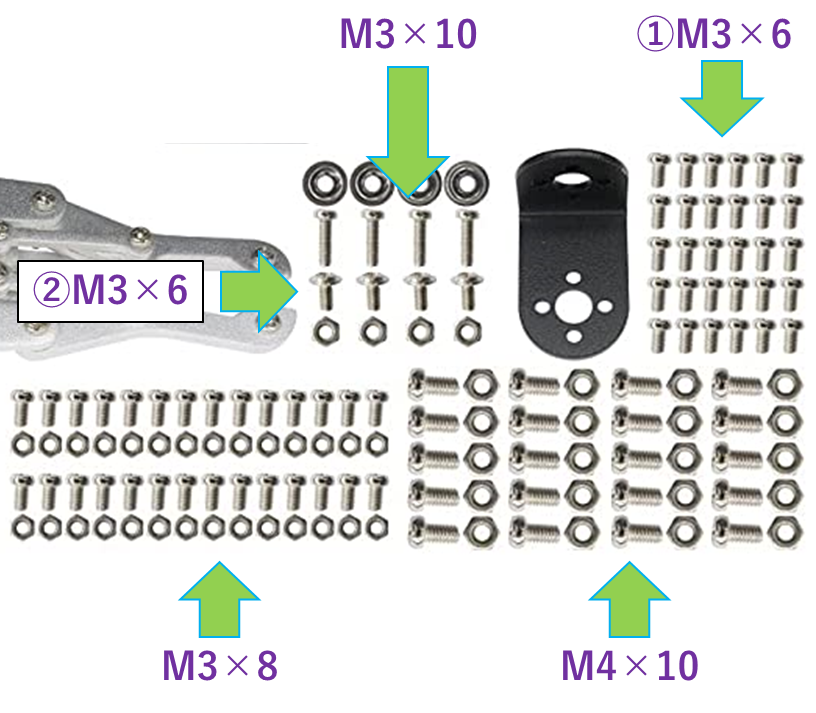
ねじは、M3×6、M3×8、M3×10、M4×10があり、M3とは、ねじの直径のことで、直径3mm、6~10は、ねじの長さ(mm)のことです。
各ねじの使用場所は下記表にまとめましたので、ご覧ください。

補足:②M3×6は、頭部が丸くなっているねじです。
モーターが入っている袋の中にも同梱されているので、そちらを使った方が無難です。
(私の場合は、頭部が丸い、黒色のねじが同梱されていました。)
組み立て時の注意点
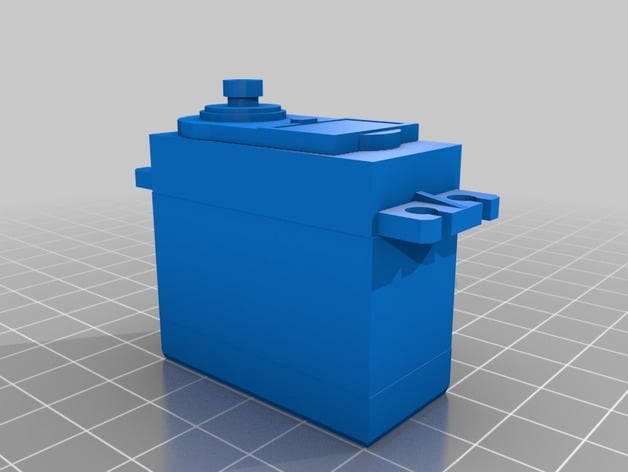
このロボットアームは、サーボモーターと呼ばれる角度で制御できるモーターを使用しています。
そのため、組み立て時にモーターの角度を位置決めしておかないと後々制御できなくなってしまいます。
あらかじめ位置決めしておくと効率よく組み立てられるので、位置決めに注意しながら組み立ててください。
位置決めついては、下記記事で解説していますので、参照してください。

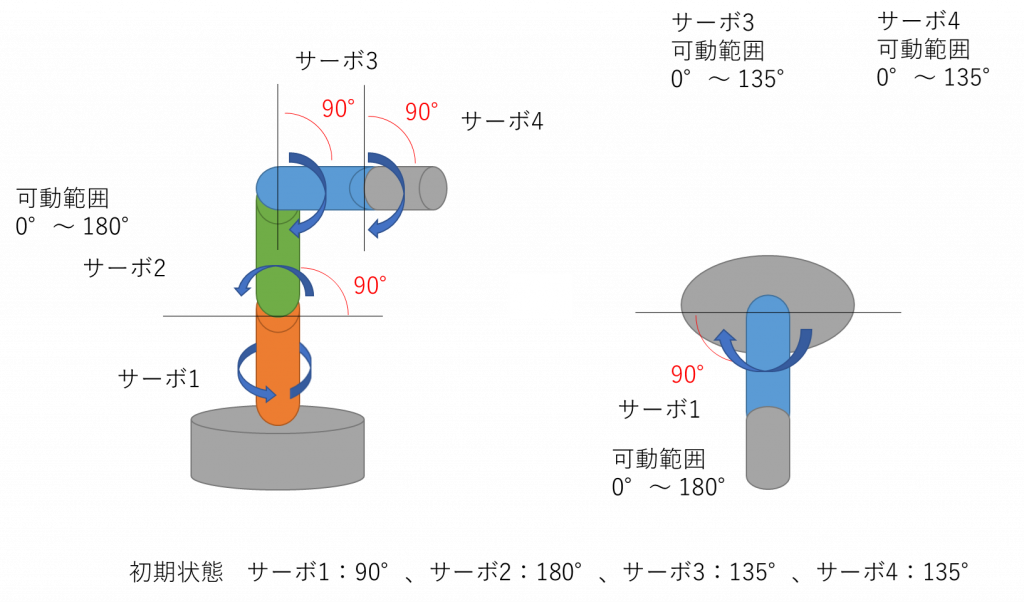
各モータの取り付け角度
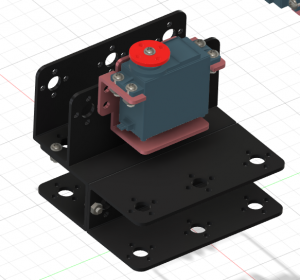
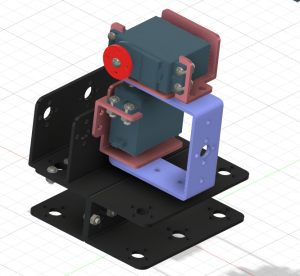
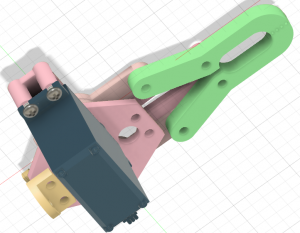
組み立て時は、上記記事で紹介しているプログラムで、サーボモーターを90°に位置決めします。
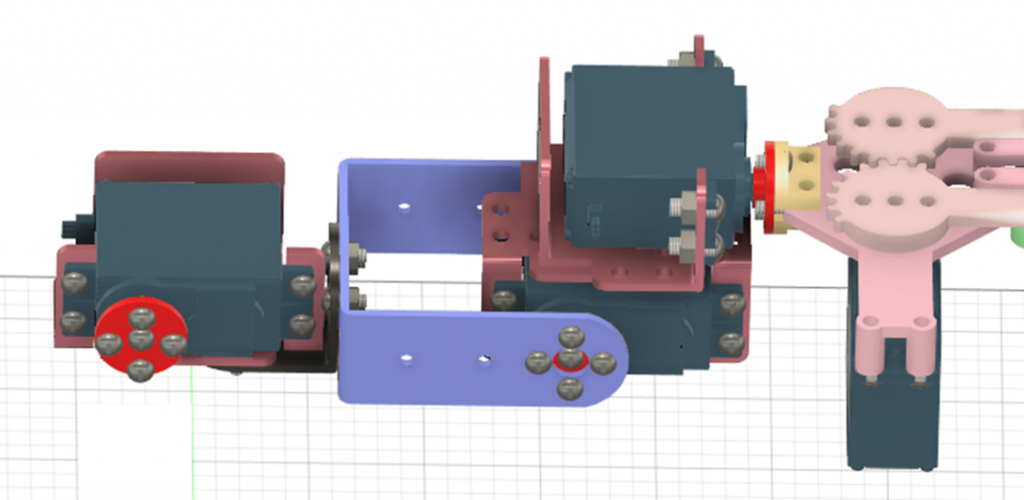
サーボモーターの角度を90°に位置決めした状態で、モーターを画像のように取り付けます。
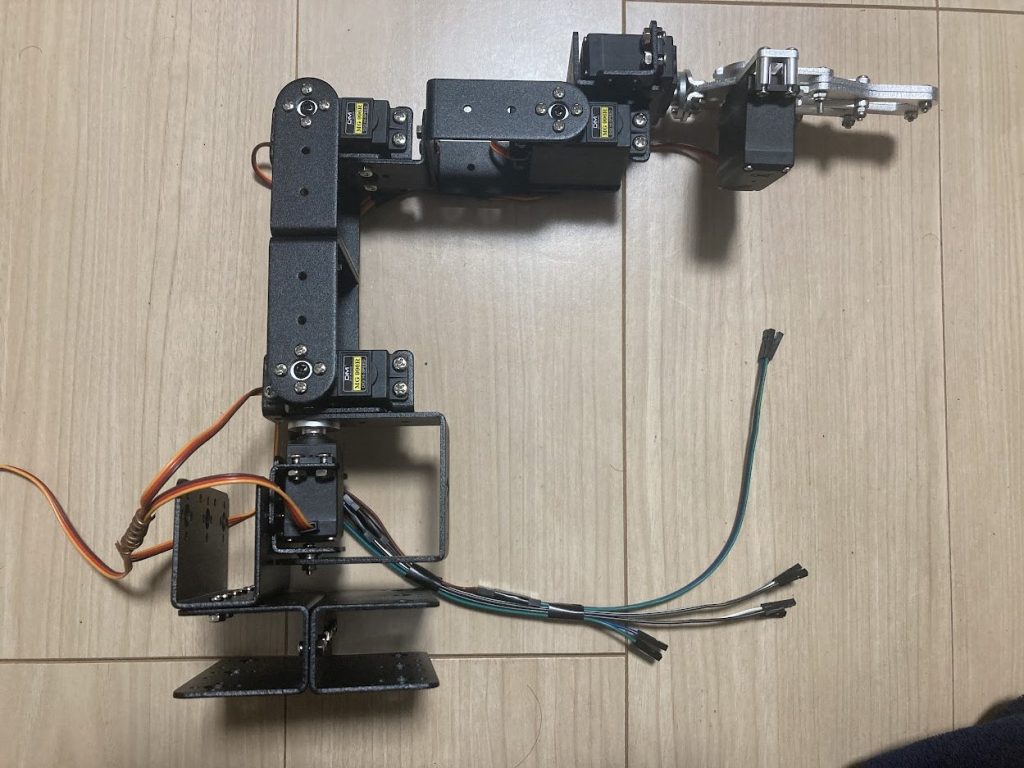
図解すると下図のようになります。
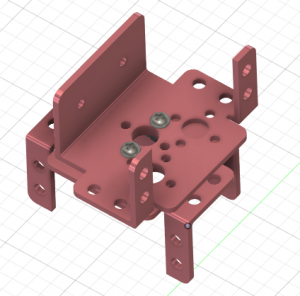
組み立て方 詳細解説
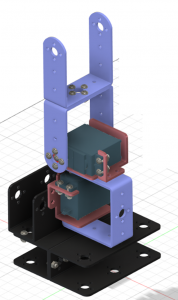
M3×8を6本(ベースブラケットを固定)
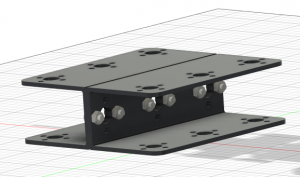
M3×8を6本(ベースブラケットを固定)
M3×8を3本(ベースとサーボ固定ホーンを固定)
M3×10でベアリングを取り付け
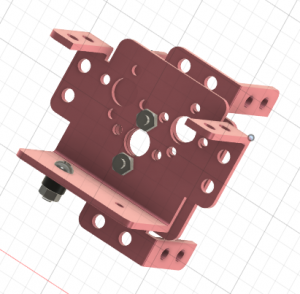
M4×10を4本(サーボ固定ホーンとサーボを固定)
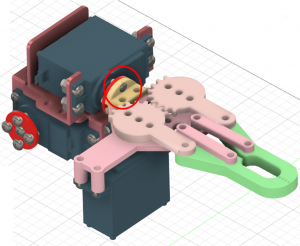
M3×6を1本(サーボとサーボホーンを固固定)
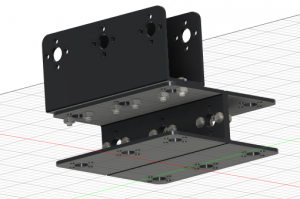
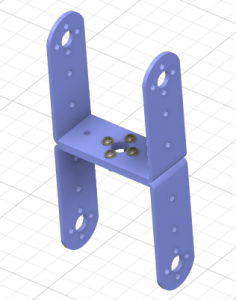
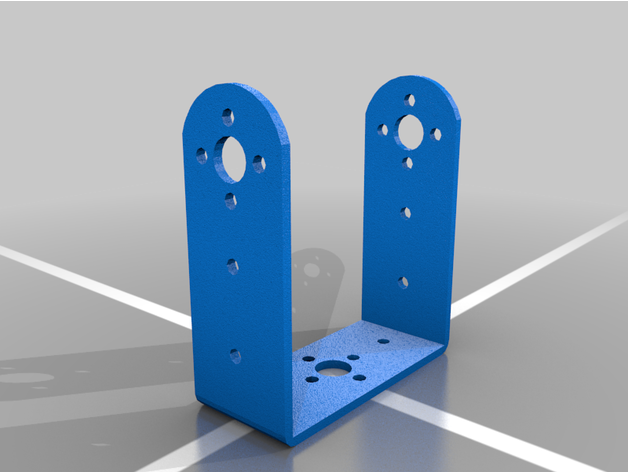
U字ブラケットのはめ込み
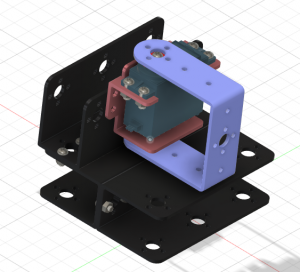
M3×6を4本(サーボ固定ホーン、U字ブラケット、サーボホーンを固定)
M3×10でベアリングを取り付け
M4×10を4本(サーボ固定ホーンとサーボを固定)
M3×6を1本(サーボとサーボホーンを固定)
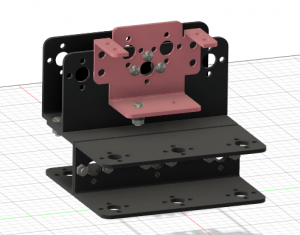
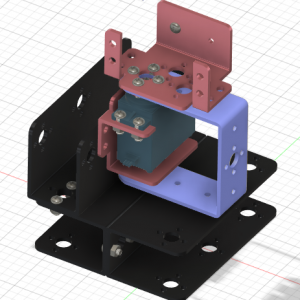
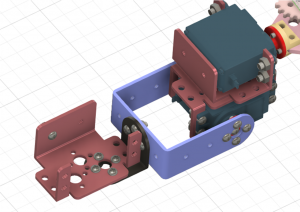
M3×8を4本(U字ブラケットを固定)
M3×6を4本(U字ブラケットとサーボホーンを固定)
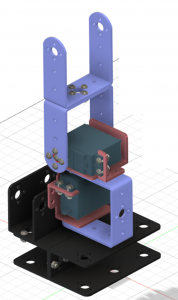
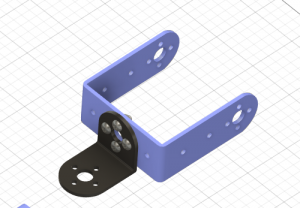
M3×8を4本(U字ブラケットとL字ブラケットを固定)
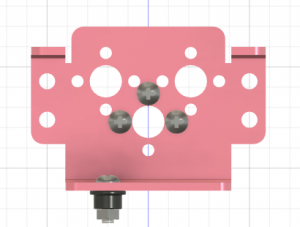
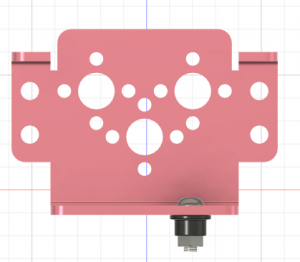
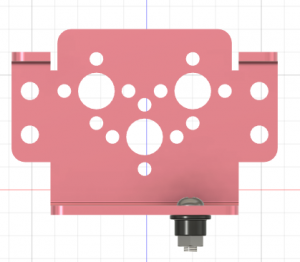
M3×8を2本(サーボ固定ホーンを固定)
背面:M3×10でベアリングを取り付け
各サーボを締結
M4×10を4本×2(サーボ固定ホーンとサーボ)
M3×6を1本×2(サーボとサーボホーンを固定)
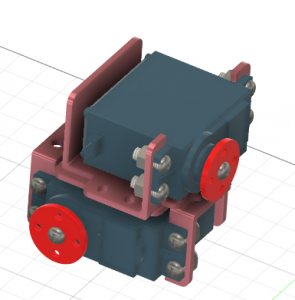
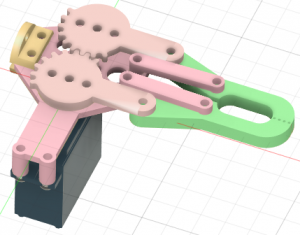
グリッパーにサーボを取り付け
背面:M4×10を4本使用
M3×6を2本(グリッパーとサーボホーンを固定)
M3×6を4本(U字ブラケットとサーボホーンを固定)

M3×8を4本(サーボ固定ホーンとL字ブラケットを固定)
M3×10でベアリングを取り付け
M4×10を4本(サーボ固定ホーンとサーボを固定)
組み立て品①
組み立て品②
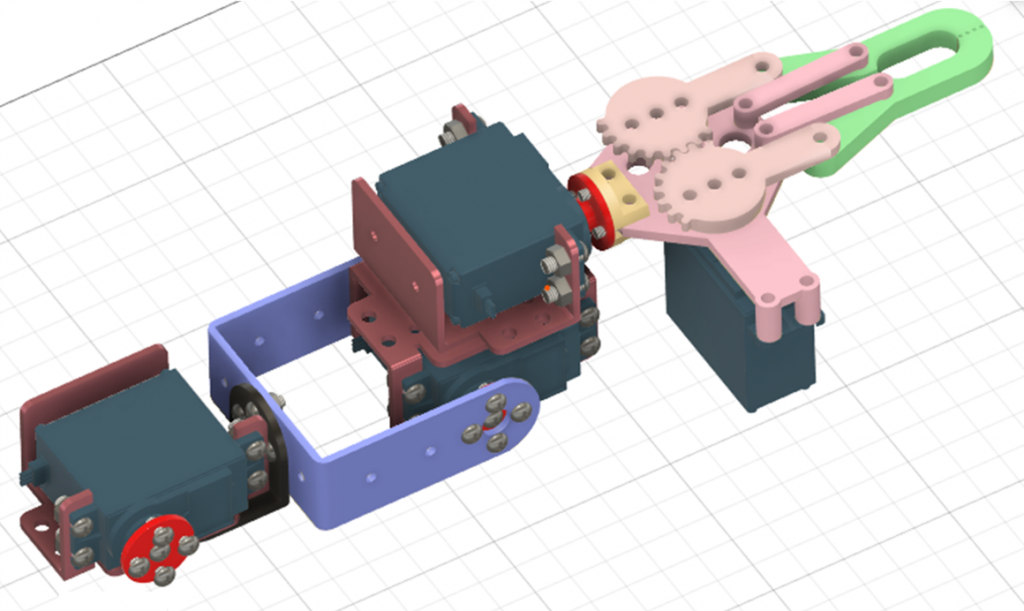
M3×6を4本で上記①と②を締結
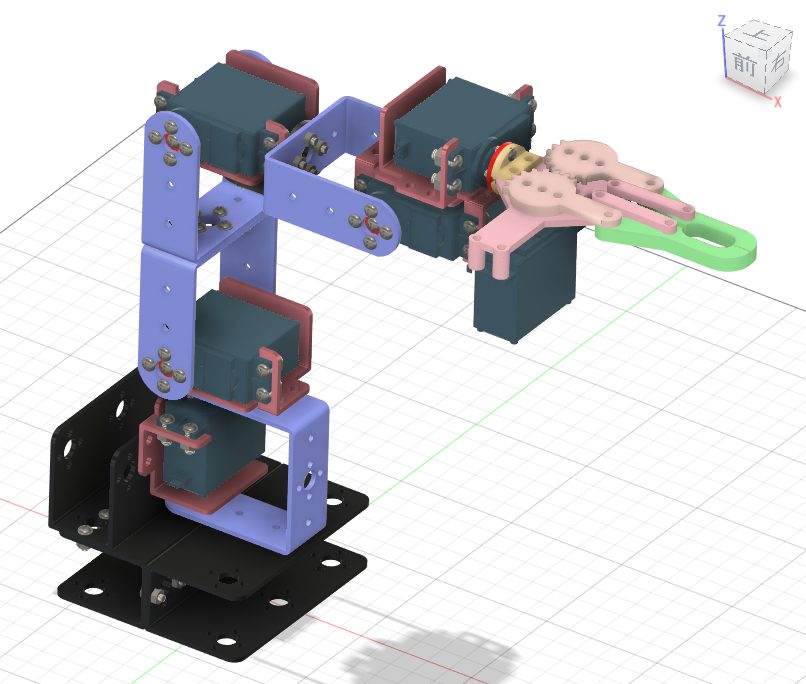
以上で組み立て完了です。
お疲れさまでした。
使用したモデルのクレジット
上記モデルを作るのに使用させていただいたモデルのクレジットを紹介したいと思います。
・サーボホーン(ホイール)
Servo Horn, Round 20mm with 25T spline for MG995, MG996R
by chrisalbertson is licensed under the Creative Commons – Attribution license.


このシリーズの他の記事
シリーズ全体の概要はこちらの記事で紹介しています。
| この記事のシリーズ一覧 | |
| ◆◆◆ STEP1_基礎編:とにかく動かす ◆◆◆ | |
| その① | コスパ最強!? ロボットアームの作り方_その① |
| その② | コスパ最強!?ロボットアームの作り方_その②__テスト回路の作り方 |
| その③ | コスパ最強!?ロボットアームの作り方_その③_機構部の組み立て方 |
| その④ | コスパ最強!?ロボットアームの作り方_その④_回路部分の作り方 |
| その⑤ | コスパ最強!?ロボットアームの作り方_その⑤_プログラム |
| ◆◆◆ STEP2_実用化編:安定して動かす ◆◆◆ | |
| その⑥ | コスパ最強!?ロボットアームの作り方_その⑥_サーボ交換と電源強化 |
| その⑦ | コスパ最強!?ロボットアームの作り方_その⑦_プログラム更新 |
| その⑧ | コスパ最強!?ロボットアームの作り方_その⑧_円筒座標系の逆運動学 |
| ◆◆◆ STEP3_応用編:自在に動かす ◆◆◆ | |
| ChatGPTとローカルLLMでロボットアームを動かして見た! | |
| ◆◆◆ Extra_おまけ編:カスタムして遊ぶ ◆◆◆ | |
| おまけ① | ロボットアームにドラゴンの頭をつけてみた |
この記事は、その③です。
必要な部品一覧
| Amazonリンク | 購入にあたって解説 | |
| ① | ロボットアーム | 在庫切れの場合はこちら (思いのほか多くの方に購入していただいたようで 在庫切れの場合があるようです。) |
| ② | Arduino 本体 | ②’を購入の場合不要。 |
| ②’ | Arduino学習キット(②、⑦、⑨セット) | ②、⑦、⑨セット こちらをおすすめします。 |
| ③ | PS4 コントローラー 純正新品 | |
| ④ | Arduino USB shield | 在庫切れの場合はこちら |
| ⑤ | USB Bluetooth アダプタ | 技適マークあり(日本で使用OKです。) |
| ⑥ | モータードライバー | |
| ⑦ | Arduino 用ワイヤーゲージ | ②’を購入の場合不要。 |
| ⑦⁺ | サーボ延長ケーブル | +αであると配線がすっきりします。 |
| ⑧ | ACアダプター | |
| ⑨ | モータードライバー用電源モジュール | ②’を購入の場合不要。 |
| ⑩ | クリップ | 普通のクリップ1個あればOKです。 |
| ⑪ | 木板 | ホームセンターに売っているものでOKです。 30cm×20cm程度。 |
| ⑫ | タッピングねじ M3×10 | これもホームセンターに売っているものでOKです。 |
コメント